پیشروبات نماینده رسمی DEVANTECH در ایران
انواع ماژول های رله با قابلیت برنامه نویسی و کنترل از طریق:
Ethernet، Bluetooth، WiFi و USB
انواع ماژول های فاصله یاب اولتراسونیک و مادون قرمز
سنسور حرارتی، قطب نما، شتاب سنج و جایرو
مبدل های USB، درایور موتور و ...















فاصلهياب اولتراسونیک (آلتراسونیک)

ماژول SRF01
کوچکترين فاصلهياب اولتراسونيک با فرستنده-گيرنده مشترک در جهان
محدوده عملکرد: ۱۸ سانتیمتر تا ۶ متر

ماژول SRF02
فاصلهیاب اولتراسونیک با دو نحوه اتصال I2C و سریال
محدوده عملکرد: ۱۶ سانتیمتر تا ۶ متر

ماژول SRF05
فاصلهياب اولتراسونيک با قيمت مناسب
محدوده عملکرد: ۱۸ سانتیمتر تا ۶ متر

ماژول SRF06
فاصلهياب اولتراسونيک با خروجی جريان ۲۰-۴ ميلیآمپر
محدوده عملکرد: ۱۸ سانتیمتر تا ۶ متر

ماژول SRF08
فاصلهياب اولتراسونيک با کارآيی بالا
محدوده عملکرد: بین ۳ سانتیمتر تا ۶ متر

ماژول SRF10
کوچکترين فاصلهياب اولتراسونيک با فرستنده-گيرنده مجزا در جهان
محدوده عملکرد: ۱۸ سانتیمتر تا ۶ متر


ماژول SRF235
فاصلهياب اولتراسونيک با پرتو باريک
محدوده عملکرد: 10 سانتیمتر تا 1.2 متر

ماژول SRF485
فاصلهياب اولتراسونيک با ارتباط RS485 و قابليت جبران دما
محدوده عملکرد: 30 سانتیمتر تا 5 متر

ماژول SRF485WPR
فاصلهياب اولتراسونيک ضد آب با ارتباط RS485 و قابليت جبران دما
محدوده عملکرد: 60 سانتیمتر تا 5 متر
ماژولهای رله
انواع ماژولهای رله Ethernet



ماژول ETH484
واسط Ethernet به 4 ورودی آنالوگ، 8 ورودی/خروجی ديجيتال و 4 عدد رله



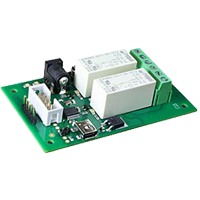
ماژول ETH0621
واسط Ethernet به 2 رله، 1 موتور، 6 ورودی ديجيتال و 2 خروجی ديجيتال

ماژول dS3484
واسط Ethernet به 4 رله، 3 پورت سریال، 8 ورودی/خروجی ديجيتال و 4 ورودی آنالوگ


ماژول dS1242
واسط Ethernet به 2 رله، 1 پورت سریال، 4 ورودی/خروجی ديجيتال و 2 ورودی آنالوگ

انواع ماژولهای رله Wifi و رله Bluetooth



ماژول WIFI8020
واسط WiFi به 8 ورودی آنالوگ و 20 عدد رله، قابلیت تنظیم WIFI از طریق پورت USB

ماژول WIFI002
واسط WiFi به 2 عدد رله، دارای نرم افزارهای رایگان آندروید و آیفون برای کنترل این ماژول

ماژول WIFI008
واسط WiFi به 8 عدد رله، دارای نرم افزارهای رایگان آندروید و آیفون برای کنترل این ماژول
انواع ماژولهای رله USB


ماژول USB-RLY82
واسط USB به 2 عدد رله کم مصرف (کویل بسیار کم مصرف 50 میلی وات)


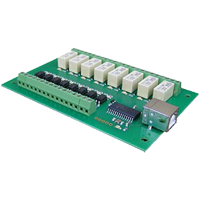
ماژول USB-RLY16
واسط USB به 8 عدد رله با جریان 16 آمپر با کنترل از طریق درگاه USB


ماژول USB-OPTO-RLY816
واسط USB به 8 عدد ورودی ایزوله شده و 8 خروجی رله با جریان 16آمپر





فاصلهیاب مادون قرمز
انواع موتور و درايور موتور



ماژول USB-GPIO12
ماژول کنترل کننده ربات بر پایه میکروکنترلر PIC18F14K50 با امکان دریافت برنامه از طریق USB









سنسور قطب نما، شتاب سنج و جایرو

ماژول CMPS11
نقطبنمای مغناطيسی با قابليت جبران خطا به کمک شتاب سنج، ژيروسکوپ و فيلتر کالمن


ماژول CMPS14
نسل پنجم قطب نمای مغناطيسی شرکت دیونتک بر پایه Bosch BNO085، جریان نامی 18 میلی آمپر و دقت 0.1 درجه

ماژول CMPS12
نسل چهارم قطب نمای مغناطيسی شرکت دیونتک بر پایه Bosch BNO055، جریان نامی 18 میلی آمپر و دقت 0.1 درجه
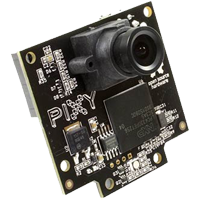
ماژول CMUcam5 Pixy
دوربين با قابليت پردازش تصوير و برنامهريزی پردازشگر، بر پایه پردازنده NXP L

ماژول CMUcam4
دوربين با قابليت پردازش تصوير و برنامهريزی پردازشگر، بر پایه پردازنده Parallax P8X32A
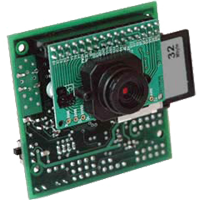
ماژول CMUcam3
دوربين با قابليت پردازش تصوير و برنامهريزی پردازشگر، بر پایه پردازنده ARM7TDMI

دوربین
سنسور حرارتی


ماژول USB-GPIO12
ماژول کنترلر ربات بر پايه ميکروکنترلر PIC18F14K50 و سرعت پروسسور 12MIPS

ماژول DEV-PIC18F67J50
ماژول کنترل ربات بر پايه ميکروکنترلرهای PIC و پردازنده 8 بیتی

ماژول DEV-PIC32MX795F512
ماژول کنترل ربات بر پايه ميکروکنترلرهای PIC و پردازنده 32 بیتی

ماژول DEV-PIC24FJ256GB206
ماژول کنترل ربات بر پايه ميکروکنترلرهای PIC و پردازنده 16 بیتی

کنترلر ربات
مبدل






ماژول LCD03
صفحه نمايش ال.سی.دی با قابليت ارتباط I2C و سریال، 20 کاراکتر در 4 ردیف و 2 رنگ

ماژول LCD03
صفحه نمايش ال.سی.دی با قابليت ارتباط I2C و سریال، 16 کاراکتر در 2 ردیف و تک رنگ

صفحه نمایش سریال
ماژول بی سیم

مجموعه ارتباط بیسيم
RF04 و CM02
مجموعه ارتباطی RF04 و CM02 برای ارتباط بی سیم بین کامپیوتر و ربات
ما برای پاسخ به سوالات شما، اینجا هستیم!
کارشناسان ما آماده پاسخگویی به سوالات و کمک در زمینهی پیاده سازی اتوماسیون رباتیک به شما هستند.
فرم روبرو را پر کنید و یا به ما به آدرس: info@pishrobot.com ایمیل بزنید.
همچنین میتوانید از طریق شماره 02188654299 با ما در ارتباط باشید.