پلتفورم ربات امدادگر خودکار
طراحی، تولید، آموزش و پشتیبانی پیشروبات
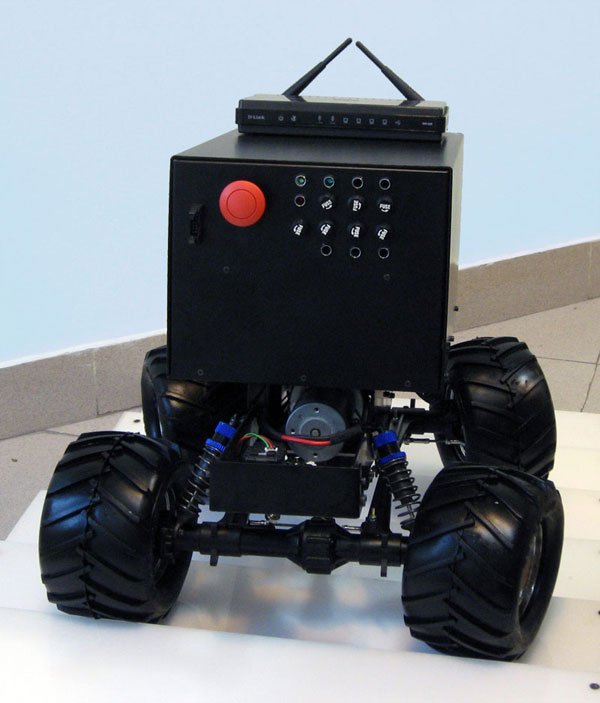
پلتفورم ربات امدادگر خودکار
رباتهای امدادگر هوشمند یا خودکار، نسل آینده از رباتهای امداد و نجات میباشند که قادر خواهند بود به طور خودکار و بدون نیاز به هدایت از راه دور، وارد محیطهای ناشناخته و خطرناک شده ضمن شناخت محیط پیرامون به عملیات امداد و نجات بپردازند. به عنوان مثال این رباتها قادر خواهند بود وارد مناطق زلزله زده شده به تهیه نقشه، جستجوی مصدومین و اعلام مکان مصدومین و در سطوح پیشرفتهتر به نجات آنان بپردازند.
لیگ رباتهای امدادگر مسابقات روبوکاپ برای رسیدن به این هدف، طراحی شده است و هر سال با رسیدن به اهداف مورد نظر که از طریق قوانین اعمال میگردد به پیچیدگی قوانین لیگ جهت نیل به هدف اصلی اضافه میگردد. پلتفورم ربات امدادگر خودکار شرکت هوشمندافزار بر طبق قوانین لیگ امدادگر و با الهام از رباتهای برتر جهان در این لیگ ساخته شده است و این امکان را به محققان و دانشجویان میدهد تا سیستمهای پیچیده درک محیط پیرامون و کنترل و هدایت ربات را به کمک آن پیاده نمایند.

مشخصات حرکتی
قابل کنترل به صورت هوشمند توسط پردازنده اصلی ربات و یا توسط اپراتور به کمک کنترل پنل نرم افزاری (بر روی صفحه وب)
قابلیت پیشروی در سطوح ناهموار، سنگلاخ، شن و ماسه، گل و لای و ... با استفاده از سیستم حرکتی 4WD (دارای دو دیفرانسیل و ضربه گیر)
بهره گیری از مکانیزم فرمان در هر دو محور عقب و جلو با قابلیت کنترل به صورت مستقل (4Wheel Steering)
دارای سیستم تعلیق بازوهای پیرو (Trailing Arm) با قابلیت تنظیم ارتفاع
سرعت حرکت مستقیم: صفر تا 10Cm/s
قابلیت بالا رفتن از سطوح شیبدار با حداکثر زاویه 35 درجه
قابلیت عبور از موانع پلکانی با حداکثر ارتفاع 10Cm
ارتباط با ربات
ارتباط WiFi: دارای Router بیسیم برای مانیتور و دسترسی به قسمتهای مختلف ربات از راه دور (802.11a و 802.11g)
ارتباط LAN: جهت ارتباط با کنترلر داخلی یا تجهیزات با واسط Ethernet
ارتباط I2C: برای ارتباط کنترلر داخلی ربات با سنسورها، درایورها و ماژولهای مختلف با واسط I2C
ارتباط سریال: دارای ارتباط سریال نوع RS485 و RS232 و سریال سطح TTL
بوردهای الکترونیکی
دارای کنترلر داخلی (Embedded Controller) بر پایه میکروکنترلر PIC18F97j60:
نحوه ارتباط با کنترلر داخلی: از طریق ارتباط LAN
کانالهای ADC: دارای 10 کانال ولتاژ و 2 کانال جریان با رزولوشن 16bit
دارای پورت I2C
دارای پورت های سریال RS485 و RS232 و TTL
دارای 16 عدد خروجی برای بورد سوئیچ
دارای 8 عدد ورودی/خروجی عمومی (GPIO)
دارای درایور موتور DC:
نحوه ارتباط: باس I2C
حداکثر جریان: 20A
ولتاژ موتور: 5 تا 24 ولت
روش کنترل: کنترل سرعت با پالس PWM به همراه ممانعت از جریان و دمای بالا
منبع تغذیه:
باطری لیتیم پولیمر: ولتاژ 11.1V و ظرفیت 8Ah
دارای بورد DC-DC:
ولتاژ ورودی: 9V~18V
ولتاژهای خروجی:
یک عدد 3.3V, 8A
یک عدد 5V, 8A
دو عدد 12V, 3.3A
دو عدد 15V, 2.6A
مدارات کنترل تغذیه:
دارای بورد سوئیچ با 15 عدد رله برای روشن و خاموش کردن تجهیزات جانبی ربات از طریق بورد کنترلر داخلی
قابلیت مانیتور ولتاژهای خروجی بورد DC-DC
مانیتور ولتاژ باطری و اعلام آلارم به هنگام افت ولتاژ
امکان ارتباط مدارات تغذیه به فیوزهای روی بدنه

موتورها
موتور محرک اصلی: موتور گیربکس 12V/48W
موتور سیستم فرمان: دو عدد سروموتور Dynamixel RX-28 برای جلو و عقب ربات
وسایل جانبی
لیزر اسکنرهای Hokuyo برای سیستم Mapping و Localization
ماژول پردازشگر RoBoard RB-110 به عنوان پردازشگر اصلی ربات جهت انجام Mapping و کنترل هوشمند ربات به همراه سنسور RM-G146 IMU
سروموتورهای RX-28 یا RX-64 جهت افقی سازی لیزر اسکنر (Stabilization)
سنسور دمای آرایهای TPA81 جهت شناسایی مصدوم به همراه براکت مخصوص جهت اتصال به بدنه ربات
سنسور اولتراسونیک SRF08 جهت تشخیص فاصله ربات تا موانع اطراف به همراه براکت مخصوص جهت اتصال به بدنه ربات
ابعاد
ابعاد ربات: 56cm x 40cm x 43cm (ارتفاع x عرض x طول)
ابعاد جعبه کنترل: 38cm x 23cm x 18.5cm (ارتفاع x عرض x طول)
فاصله محور چرخ عقب و جلو: 38cm
قطر چرخها: 16cm