سروو موتور رباتیک هوشمند DYNAMIXEL
پیشروبات نماینده انحصاری ROBOTIS در ایران
سروموتور هوشمند DYNAMIXEL، محصول شرکت ROBOTIS، که با رویکردهای خاص رباتیک طراحی شده است، در واقع یک عملگر و سنسور هوشمند با ساختار شبکه ای میباشد که ضمن دریافت فرمان از کنترلر اصلی میتواند اطلاعات مختلفی نظیر موقعیت موتور، سرعت موتور، بار موتور، دمای داخلی ماژول، ولتاژ ورودی و ... را به کنترلر برگرداند.
از خواص برجسته سروموتور داینامیکسل این است که میتوان آن را هم به کمک انواع کنترلرهای مبتنی بر میکروکنترلر و هم توسط کامپیوتر از طریق برنامهها و محیطهای برنامه نویسی مختلف نظیر MATLAB، Python، ROS، Java، Labview، Visual Studio و ... کنترل نمود.
همچنین این سرو موتور DC را به علت دارا بودن قابلیت گردش کامل میتوان هم در حالت کنترل موقعیت به عنوان سروو موتور (Servo Motor) و هم در حالت کنترل سرعت به عنوان موتور دی سی با فیدبک انکودر absolute استفاده نمود.
نسل های جدید سروموتورهای شرکت رباتیس (نظیر سری MX) دارای پردازنده 32 بیتی ARM و انکودر 12 بیتی absolute میباشند و قادر هستند در تمام محدوده °360 موقعیت موتور گیربکس را کنترل نمایند. برخی از انواع سری MX دارای حالت کنترل گشتاور نیز میباشند.
درون بسیاری از سرووموتور های داینامیکسل از موتور دی سی مکسون موتور سوئیس (Maxon Motor) که دارای خواص طول عمر بالا در عین کوچک بودن میباشد استفاده شده است.
امروزه این سروموتورها نامی آشنا در لیگهای مختلف ربوکاپ نظیر لیگ رباتهای خانگی، رباتهای امداد و نجات (امدادگر)، رباتهای مینیاب و به خصوص لیگ ربات های فوتبالیست انسان نما (در سایزهای مختلف Kid Size و Teen Size و Adult Size) میباشد. همچنین این سروموتور دیجیتال هوشمند در پروژههای مختلف علمی و پژوهشی استفادههای فراوان دارد.
از خواص برجسته سروموتور داینامیکسل این است که میتوان آن را هم به کمک انواع کنترلرهای مبتنی بر میکروکنترلر و هم توسط کامپیوتر از طریق برنامهها و محیطهای برنامه نویسی مختلف نظیر MATLAB، Python، ROS، Java، Labview، Visual Studio و ... کنترل نمود.
همچنین این سرو موتور DC را به علت دارا بودن قابلیت گردش کامل میتوان هم در حالت کنترل موقعیت به عنوان سروو موتور (Servo Motor) و هم در حالت کنترل سرعت به عنوان موتور دی سی با فیدبک انکودر absolute استفاده نمود.
نسل های جدید سروموتورهای شرکت رباتیس (نظیر سری MX) دارای پردازنده 32 بیتی ARM و انکودر 12 بیتی absolute میباشند و قادر هستند در تمام محدوده °360 موقعیت موتور گیربکس را کنترل نمایند. برخی از انواع سری MX دارای حالت کنترل گشتاور نیز میباشند.
درون بسیاری از سرووموتور های داینامیکسل از موتور دی سی مکسون موتور سوئیس (Maxon Motor) که دارای خواص طول عمر بالا در عین کوچک بودن میباشد استفاده شده است.
امروزه این سروموتورها نامی آشنا در لیگهای مختلف ربوکاپ نظیر لیگ رباتهای خانگی، رباتهای امداد و نجات (امدادگر)، رباتهای مینیاب و به خصوص لیگ ربات های فوتبالیست انسان نما (در سایزهای مختلف Kid Size و Teen Size و Adult Size) میباشد. همچنین این سروموتور دیجیتال هوشمند در پروژههای مختلف علمی و پژوهشی استفادههای فراوان دارد.

سروموتورهای هوشمند Dynamixel
سروسیستم مجتمع و کامل:
موتور DC + گیربکس + سنسور + کنترلر + درایور + شبکه = DYNAMIXEL
تنوع در ساخت و ساز:
ساخت ربات های مختلف با سرهم کردن ماژولهای DYNAMIXEL
کنترل از طریق شبکه:
قابلیت برقراری ارتباط شبکهای به صورت TTL یا RS485
قابلیت دریافت فیدبکهای مختلف:
فیدبکهای موقعیت، سرعت، بار، دمای داخلی ماژول، ولتاژ ورودی و ...
ارتباطات ساده:
بهرهگیری از نحوه اتصال زنجیروار سیمها جهت سهولت ارتباط و کاهش تداخل
موتور DC + گیربکس + سنسور + کنترلر + درایور + شبکه = DYNAMIXEL
تنوع در ساخت و ساز:
ساخت ربات های مختلف با سرهم کردن ماژولهای DYNAMIXEL
کنترل از طریق شبکه:
قابلیت برقراری ارتباط شبکهای به صورت TTL یا RS485
قابلیت دریافت فیدبکهای مختلف:
فیدبکهای موقعیت، سرعت، بار، دمای داخلی ماژول، ولتاژ ورودی و ...
ارتباطات ساده:
بهرهگیری از نحوه اتصال زنجیروار سیمها جهت سهولت ارتباط و کاهش تداخل
جدول مشخصات Dynamixel

| سری | مدل | راهنما | پروتکل ارتباطی | گشتاور Stall N.m | جریان Stall A | سرعت بیباری RPM | نسبت گیربکس | وزن g | ولتاژ | سنسور موقعیت (Resolution) | ابعاد mm | موتور | جنس گیربکس |
| سری XL | XL-320 | TTL | 0.39 (در 7.4 ولت) | - | 114 (در 7.4 ولت) | 238 | 16.7 | 8.4~6 | پتانسیومتر (300درجه/1024) | 24 x 36 x 27 | Cored | enpla | |
| سری AX | AX-12A |
| 1.52 (در 12 ولت) | 1.5 (در 12 ولت) | 59 (در 12 ولت) | 254 | 54.6 | 12~9 | پتانسیومتر (300درجه/1024) | 32 x 50 x 40 | Cored | ||
| AX-18A |
| 1.83 (در 12 ولت) | 2.2 (در 12 ولت) | 97 (در 12 ولت) | 254 | 55.9 | 12~9 | پتانسیومتر (300درجه/1024) | 32 x 50 x 40 | Coreless | |||
|
AX-12W |
| 0.2 (در 12 ولت) | 1.3 (در 12 ولت) | 470 (در 12 ولت) | 32 | 52.9 | 12~9 | پتانسیومتر (300درجه/1024) | 32 x 50 x 40 | Cored | |||
| سری MX | MX-12W | | 0.2 (در 12 ولت) | 1.3 (در 12 ولت) | 470 (در 12 ولت) | 32 | 54.6 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 32 x 50 x 40 | Cored | ||
|
MX-28T |
| 3.1 (در 14.8 ولت) | 1.7 (در 14.8 ولت) | 67 (در 14.8 ولت) | 193 | 72 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 35.6 x 50.6 x 35.5 | Maxon | metal | ||
| MX-28AT |
| 3.1 (در 14.8 ولت) | 1.7 (در 14.8 ولت) | 67 (در 14.8 ولت) | 193 | 72 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 35.6 x 50.6 x 35.5 | Maxon | |||
|
MX-64T |
| 7.3 (در 14.8 ولت) | 5.2 (در 14.8 ولت) | 78 (در 14.8 ولت) | 200 | 126 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 40.2 x 61.1 x 41 | Maxon | |||
| MX-64AT | | 7.3 (در 14.8 ولت) | 5.2 (در 14.8 ولت) | 78 (در 14.8 ولت) | 200 | 126 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 40.2 x 61.1 x 41 | Maxon | |||
|
MX-106T |
| 10 (در 14.8 ولت) | 6.3 (در 14.8 ولت) | 55 (در 14.8 ولت) | 225 | 153 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 40.2 x 65.1 x 46 | Maxon | |||
|
MX-28R |
| RS-485 | 3.1 (در 14.8 ولت) | 1.7 (در 14.8 ولت) | 67 (در 14.8 ولت) | 193 | 72 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 35.6 x 50.6 x 35.5 | Maxon | ||
| MX-28AR |
| 3.1 (در 14.8 ولت) | 1.7 (در 14.8 ولت) | 67 (در 14.8 ولت) | 193 | 72 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 35.6 x 50.6 x 35.5 | Maxon | |||
|
MX-64R |
| 7.3 (در 14.8 ولت) | 5.2 (در 14.8 ولت) | 78 (در 14.8 ولت) | 200 | 126 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 40.2 x 61.1 x 41 | Maxon | |||
| MX-64AR | | 7.3 (در 14.8 ولت) | 5.2 (در 14.8 ولت) | 78 (در 14.8 ولت) | 200 | 126 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 40.2 x 61.1 x 41 | Maxon | |||
|
MX-106R |
| 10 (در 14.8 ولت) | 6.3 (در 14.8 ولت) | 55 (در 14.8 ولت) | 225 | 153 | 14.8~10 | انکودر مغناطیسی (360درجه/4096) | 40.2 x 65.1 x 46 | Maxon | |||
| سری RX | RX-10 |
| 1.32 (در 12 ولت) | 0.8 (در 12 ولت) | 54 (در 12 ولت) | 193 | 64.5 | 12~10 | پتانسیومتر (300درجه/1024) | 35.6 x 50.6 x 35.5 | Maxon | ||
| RX-24F |
| 2.65 (در 12 ولت) | 2.4 (در 12 ولت) | 126 (در 12 ولت) | 193 | 67 | 12~9 | پتانسیومتر (300درجه/1024) | 35.6 x 50.6 x 35.5 | Coreless | |||
| RX-28 |
| 3.77 (در 18.5 ولت) | 1.9 (در 18.5 ولت) | 85 (در 18.5 ولت) | 193 | 72 | 18.5~12 | پتانسیومتر (300درجه/1024) | 35.6 x 50.6 x 35.5 | Maxon | |||
| RX-64 |
| 5.30 (در 18.5 ولت) | 2.6 (در 18.5 ولت) | 64 (در 18.5 ولت) | 200 | 125 | 18.5~12 | پتانسیومتر (300درجه/1024) | 40.2 x 61.1 x 41 | Maxon | |||
| سری EX | EX-106+ |
| 10.91 (در 18.5 ولت) | 7 (در 18.5 ولت) | 91 (در 18.5 ولت) | 184 | 154 | 18.5~12 | انکودر مغناطیسی (251درجه/4096) | 40.2 x 65.1 x 46 | Maxon |
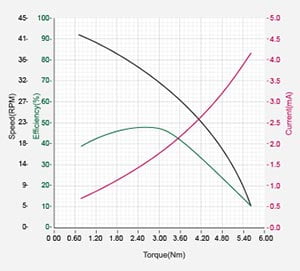
لطفاً قبل از خرید داینامیکسل، در موقع طراحی و انتخاب سرو موتور به این نکته توجه فرمایید که سازندههای سروموتور گشتاور Stall یک سرو موتور را اعلام مینمایند که نسبت به گشتاور دینامیک قابل اعمال آن در حال حرکت مقدار بزرگتری میباشد. برای داشتن حرکتهای دینامیکی پایدار و کاملاً هموار در ربات خود، توصیه میشود گشتاوری معادل 20٪ گشتاور استال و یا کمتر برای سروموتورها در نظر بگیرید و یا برای بهینه کردن این موضوع در سرعت های مطلوب خود، از نمودارهای ارائه شده توسط شرکت رباتیس استفاده نمایید.
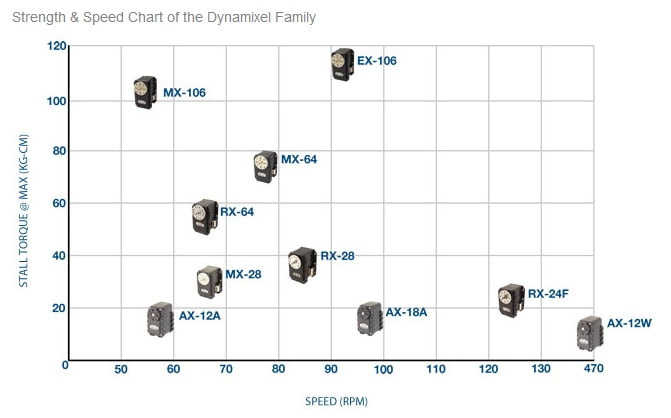
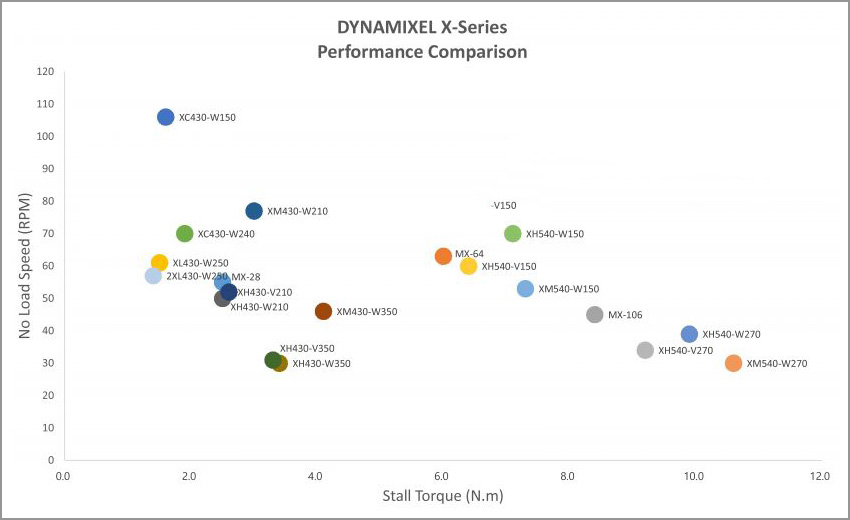
نمودار مقایسه ای داینامیکسل
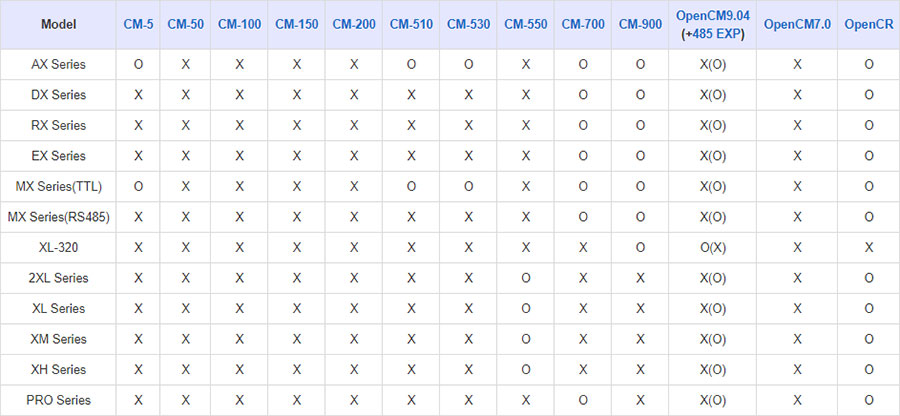
جدول سازگاری برخی کنترلرها با انواع داینامیکسل
انواع داینامیکسل
سروموتور Dynamixel MX-12W
موتور DC داخلی: Cored Motor
پردازنده: ST CORTEX-M3 پردازنده 32 بیت با سرعت 72MHZ به نام ST32F103C8
سنسور موقعیت: انکودر بدون تماس مغناطیسی 12BIT و 360 درجه کامل
سرعت ارتباط: 8000bps الی 4.5Mbps
الگوریتم کنترل: PID قابل تنظیم توسط کاربر
دقت: °0.088
میزان حرکت: صفر تا °360 و یا به صورت Endless
وزن: 54.6g
ابعاد: 32mm x 50mm x 40mm
نسبت گیربکس: 1/32
گشتاور stall: برابر 0.2N.m در ولتاژ 12، جریان 1.3A
پردازنده: ST CORTEX-M3 پردازنده 32 بیت با سرعت 72MHZ به نام ST32F103C8
سنسور موقعیت: انکودر بدون تماس مغناطیسی 12BIT و 360 درجه کامل
سرعت ارتباط: 8000bps الی 4.5Mbps
الگوریتم کنترل: PID قابل تنظیم توسط کاربر
دقت: °0.088
میزان حرکت: صفر تا °360 و یا به صورت Endless
وزن: 54.6g
ابعاد: 32mm x 50mm x 40mm
نسبت گیربکس: 1/32
گشتاور stall: برابر 0.2N.m در ولتاژ 12، جریان 1.3A

سرعت بیباری: 470 دور در دقیقه در 12ولت
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
محدوده دما: 5- الی 80 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 254 کد از 0 تا 253
جریان استندبای: 60mA
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
محدوده دما: 5- الی 80 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 254 کد از 0 تا 253
جریان استندبای: 60mA
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
توجه: سروموتور MX-12W مشابه AX-12W اما با دقت بسیار بالاتر میباشد. از جمله کاربردهای این دو نوع سروموتور ساخت ربات چرخدار سریع میباشد.
سروموتور Dynamixel MX-28/MX-28A
موتور DC داخلی: Maxon Motor
پردازنده: ST CORTEX-M3 پردازنده 32 بیت با سرعت 72MHZ به نام ST32F103C8
سنسور موقعیت: انکودر بدون تماس مغناطیسی 12BIT و 360 درجه
سرعت ارتباط: 8000bps الی 3Mbps
الگوریتم کنترل: PID قابل تنظیم توسط کاربر
دقت: °0.088
میزان حرکت: صفر تا °360 و یا به صورت Endless
وزن: 72g
ابعاد: 35.6mm x 50.6mm x 35.5mm
نسبت گیربکس: 1/193
گشتاور stall: برابر 3.1N.m در ولتاژ 14.8، جریان 1.7A
پردازنده: ST CORTEX-M3 پردازنده 32 بیت با سرعت 72MHZ به نام ST32F103C8
سنسور موقعیت: انکودر بدون تماس مغناطیسی 12BIT و 360 درجه
سرعت ارتباط: 8000bps الی 3Mbps
الگوریتم کنترل: PID قابل تنظیم توسط کاربر
دقت: °0.088
میزان حرکت: صفر تا °360 و یا به صورت Endless
وزن: 72g
ابعاد: 35.6mm x 50.6mm x 35.5mm
نسبت گیربکس: 1/193
گشتاور stall: برابر 3.1N.m در ولتاژ 14.8، جریان 1.7A

سرعت بیباری: 67 دور در دقیقه در 14.8ولت
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: ارائه شده در دو مدل سروموتور MX-28T و MX-28AT با لايه فیزیکی TTL Level Multi Drop و سروموتور MX-28R و MX-28AR با لايه فیزیکی RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
جریان استندبای: 100mA
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: ارائه شده در دو مدل سروموتور MX-28T و MX-28AT با لايه فیزیکی TTL Level Multi Drop و سروموتور MX-28R و MX-28AR با لايه فیزیکی RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
جریان استندبای: 100mA
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
توجه ۱: سروموتور MX-28 یا RX-28M از لحاظ ظاهری و ابعاد شبیه RX-28 و RX-24F اما با ارتباط Dynamixel از نوع TTL و همچنین دقت فیدبک موقعیت بسیار بالاتر آن هم در تمام محدوده 360 درجه میباشد.
توجه ۲: سروموتورهای MX-28 و MX-28A از نظر مشخصات فنی یکسان هستند با این تفاوت که نوع A دارای درپوش آلومینیومی میباشد و در نتیجه حرارت داخلی آن راحتتر به محیط منتقل میشود.
توجه ۲: سروموتورهای MX-28 و MX-28A از نظر مشخصات فنی یکسان هستند با این تفاوت که نوع A دارای درپوش آلومینیومی میباشد و در نتیجه حرارت داخلی آن راحتتر به محیط منتقل میشود.
سروموتور Dynamixel MX-64/MX-64A
موتور DC داخلی: Maxon Motor
پردازنده: ST CORTEX-M3 پردازنده 32 بیت با سرعت 72MHZ
سنسور موقعیت: انکودر بدون تماس مغناطیسی 12BIT و 360 درجه کامل
سرعت ارتباط: 8000bps الی 3Mbps
الگوریتم کنترل: PID قابل تنظیم توسط کاربر
دقت: °0.088
میزان حرکت: صفر تا °360 و یا به صورت Endless
وزن: 126 گرم
ابعاد: 40.2mm x 61.1mm x 41mm
نسبت گیربکس: 1/200
گشتاور stall: برابر 7.3N.m در ولتاژ 14.8، جریان 5.2A
پردازنده: ST CORTEX-M3 پردازنده 32 بیت با سرعت 72MHZ
سنسور موقعیت: انکودر بدون تماس مغناطیسی 12BIT و 360 درجه کامل
سرعت ارتباط: 8000bps الی 3Mbps
الگوریتم کنترل: PID قابل تنظیم توسط کاربر
دقت: °0.088
میزان حرکت: صفر تا °360 و یا به صورت Endless
وزن: 126 گرم
ابعاد: 40.2mm x 61.1mm x 41mm
نسبت گیربکس: 1/200
گشتاور stall: برابر 7.3N.m در ولتاژ 14.8، جریان 5.2A

سرعت بیباری: 78 دور در دقیقه در 14.8ولت
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: ارائه شده در دو مدل سروموتور MX-64T و MX-64AT با لايه فیزیکی TTL Level Multi Drop و سروموتور MX-64R و MX-64AR با لايه فیزیکی RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
جریان استندبای: 100mA
فیدبک: مکان، دما، بار (با دقت بالا)، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: ارائه شده در دو مدل سروموتور MX-64T و MX-64AT با لايه فیزیکی TTL Level Multi Drop و سروموتور MX-64R و MX-64AR با لايه فیزیکی RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
جریان استندبای: 100mA
فیدبک: مکان، دما، بار (با دقت بالا)، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
توجه ۱: سروموتور MX-64 از لحاظ ظاهری و ابعاد شبیه RX-64 اما با دقت فیدبک موقعیت بسیار بالاتر آن هم در تمام محدوده 360 درجه و همچنین دارای حالت کنترل گشتاور و فیدبک بار دقیق بر مبنای جریان میباشد.
توجه ۲: سروموتورهای MX-64 و MX-64A از نظر مشخصات فنی یکسان هستند با این تفاوت که نوع A دارای درپوش آلومینیومی میباشد و در نتیجه حرارت داخلی آن راحتتر به محیط منتقل میشود.
توجه ۲: سروموتورهای MX-64 و MX-64A از نظر مشخصات فنی یکسان هستند با این تفاوت که نوع A دارای درپوش آلومینیومی میباشد و در نتیجه حرارت داخلی آن راحتتر به محیط منتقل میشود.
سروموتور Dynamixel MX-106
موتور DC داخلی: Maxon Motor
پردازنده: ST CORTEX-M3 پردازنده 32 بیت با سرعت 72MHZ
سنسور موقعیت: انکودر بدون تماس مغناطیسی 12BIT و 360 درجه کامل
سرعت ارتباط: 8000bps الی 3Mbps
الگوریتم کنترل: PID قابل تنظیم توسط کاربر
دقت: °0.088
میزان حرکت: صفر تا °360 و یا به صورت Endless
وزن: 153 گرم
ابعاد: 40.2mm x 65.1mm x 46mm
نسبت گیربکس: 1/225
گشتاور stall: برابر 10N.m در ولتاژ 14.8، جریان 6.3A
پردازنده: ST CORTEX-M3 پردازنده 32 بیت با سرعت 72MHZ
سنسور موقعیت: انکودر بدون تماس مغناطیسی 12BIT و 360 درجه کامل
سرعت ارتباط: 8000bps الی 3Mbps
الگوریتم کنترل: PID قابل تنظیم توسط کاربر
دقت: °0.088
میزان حرکت: صفر تا °360 و یا به صورت Endless
وزن: 153 گرم
ابعاد: 40.2mm x 65.1mm x 46mm
نسبت گیربکس: 1/225
گشتاور stall: برابر 10N.m در ولتاژ 14.8، جریان 6.3A

سرعت بیباری: 55 دور در دقیقه در 14.8ولت
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: ارائه شده در دو مدل سروموتور MX-106T با لايه فیزیکی TTL Level Multi Drop و سروموتور MX-106R با لايه فیزیکی RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
جریان استندبای: 100mA
فیدبک: مکان، دما، بار (با دقت بالا)، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: ارائه شده در دو مدل سروموتور MX-106T با لايه فیزیکی TTL Level Multi Drop و سروموتور MX-106R با لايه فیزیکی RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
جریان استندبای: 100mA
فیدبک: مکان، دما، بار (با دقت بالا)، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
توجه ۱: سروموتور MX-106 از لحاظ ظاهری و ابعاد شبیه + EX-106 اما با فیدبک موقعیت در تمام محدوده 360 درجه و همچنین دارای حالت کنترل گشتاور و فیدبک بار دقیق بر مبنای جریان میباشد.
توجه ۲: تمامی انواع سروموتورهای MX-106 دارای درپوش آلومینیومی میباشد و در نتیجه حرارت داخلی آن راحتتر به محیط منتقل میشود.
توجه ۲: تمامی انواع سروموتورهای MX-106 دارای درپوش آلومینیومی میباشد و در نتیجه حرارت داخلی آن راحتتر به محیط منتقل میشود.
نمودار عملکرد سروموتورها
MX-28/MX-28A
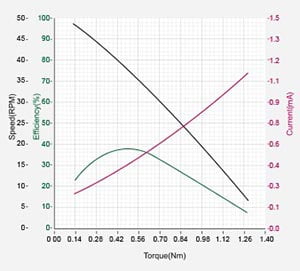
MX-64/MX-64A
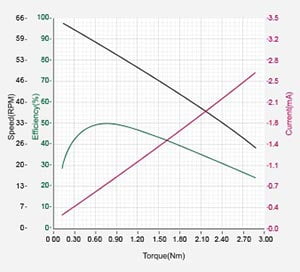
MX-106
سروموتور +Dynamixel AX-12A / AX-12
موتور DC داخلی: Cored Motor
وزن: 54.6 گرم
ابعاد: 32mm x 50.1mm x 40mm
نسبت گیربکس: 1/254
گشتاور stall: برابر 1.5N.m در ولتاژ 12، جریان 1.4A
سرعت بیباری: 59 دور در دقیقه
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 9 الی 12 ولت (توصیه 11.1V)
وزن: 54.6 گرم
ابعاد: 32mm x 50.1mm x 40mm
نسبت گیربکس: 1/254
گشتاور stall: برابر 1.5N.m در ولتاژ 12، جریان 1.4A
سرعت بیباری: 59 دور در دقیقه
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 9 الی 12 ولت (توصیه 11.1V)

محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
توجه: سروموتور AX-12A نسخه جدید +AX-12 با تغییراتی در بدنه آن میباشد.
سروموتور Dynamixel AX-18A
موتور DC داخلی: Coreless Motor
وزن: 55.9 گرم
ابعاد: 32mm x 50.1mm x 40mm
نسبت گیربکس: 1/254
گشتاور stall: برابر 1.8N.m در ولتاژ 12، جریان 2.2A
سرعت بیباری: 97 دور در دقیقه
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 9 الی 12 ولت (توصیه 11.1V)
وزن: 55.9 گرم
ابعاد: 32mm x 50.1mm x 40mm
نسبت گیربکس: 1/254
گشتاور stall: برابر 1.8N.m در ولتاژ 12، جریان 2.2A
سرعت بیباری: 97 دور در دقیقه
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 9 الی 12 ولت (توصیه 11.1V)

محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
توجه: سروموتور AX-18A از لحاظ ظاهری و ابعاد شبیه AX-12A اما با گشتاور و سرعت بالاتر میباشد لذا بدون تغییر در شکل ربات در جایی که به سرعت و نیروی بیشتر احتیاج است میتوان آن را جایگزین AX-12A نمود.
سروموتور Dynamixel AX-12W
موتور DC داخلی: Cored Motor
وزن: 52.9 گرم
ابعاد: 32mm x 50.1mm x 40mm
نسبت گیربکس: 1/32
گشتاور stall: برابر 0.2N.m در ولتاژ 12، جریان 1.3
سرعت بیباری: 470 دور در دقیقه (در ولتاژ 12)
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 9 الی 12 ولت (توصیه 11.1V)
وزن: 52.9 گرم
ابعاد: 32mm x 50.1mm x 40mm
نسبت گیربکس: 1/32
گشتاور stall: برابر 0.2N.m در ولتاژ 12، جریان 1.3
سرعت بیباری: 470 دور در دقیقه (در ولتاژ 12)
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 9 الی 12 ولت (توصیه 11.1V)

محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
توجه: سروموتور AX-12W از لحاظ ظاهری و ابعاد شبیه AX-12A اما با سرعت بسیار بالاتر میباشد (موتور سرعتی).
سروموتور Dynamixel RX-24F
موتور دی سی داخلی: Coreless Motor
وزن: 67 گرم
ابعاد: 35.6mm x 50.6mm x 35.5mm
نسبت گیربکس: 1/193
گشتاور stall: برابر 2.6N.m در ولتاژ 12، جریان 2.4A
سرعت بیباری: 126 دور در دقیقه
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 9 الی 12 ولت
وزن: 67 گرم
ابعاد: 35.6mm x 50.6mm x 35.5mm
نسبت گیربکس: 1/193
گشتاور stall: برابر 2.6N.m در ولتاژ 12، جریان 2.4A
سرعت بیباری: 126 دور در دقیقه
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 9 الی 12 ولت

محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت RS485 آسنکرون
لایه فیزیکی: RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت RS485 آسنکرون
لایه فیزیکی: RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
سروموتور Dynamixel RX-28
موتور داخلی: Maxon Motor
وزن: 72 گرم
ابعاد: 35.6mm x 50.6mm x 35.5mm
نسبت گیربکس: 1/193
گشتاور stall: برابر 3.7N.m در ولتاژ 18.5، جریان 1.9A
سرعت بیباری: 85 دور در دقیقه در ولتاژ 18.5
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 12 الی 18.5 ولت (توصیه 14.4V)
وزن: 72 گرم
ابعاد: 35.6mm x 50.6mm x 35.5mm
نسبت گیربکس: 1/193
گشتاور stall: برابر 3.7N.m در ولتاژ 18.5، جریان 1.9A
سرعت بیباری: 85 دور در دقیقه در ولتاژ 18.5
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 12 الی 18.5 ولت (توصیه 14.4V)

محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت RS485 آسنکرون
لایه فیزیکی: RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت RS485 آسنکرون
لایه فیزیکی: RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
توجه: سروموتور RX-24F از لحاظ ظاهری و ابعاد شبیه RX-28 اما با سرعت بالاتر و گشتاور پایینتر میباشد لذا بدون تغییر در شکل ربات در جایی که به سرعت بیشتر احتیاج است میتوان آن را جایگزین RX-28 نمود.
سروموتور Dynamixel RX-64
موتور دی سی داخلی: Maxon Motor
وزن: 125 گرم
ابعاد: 40.2mm x 61.1mm x 41mm
نسبت گیربکس: 1/200
گشتاور stall: برابر 5.2N.m در ولتاژ 18.5، جریان 2.6A
سرعت بیباری: 64 دور در دقیقه در ولتاژ 18.5
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 12 الی 18.5 ولت (توصیه 18V)
وزن: 125 گرم
ابعاد: 40.2mm x 61.1mm x 41mm
نسبت گیربکس: 1/200
گشتاور stall: برابر 5.2N.m در ولتاژ 18.5، جریان 2.6A
سرعت بیباری: 64 دور در دقیقه در ولتاژ 18.5
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 12 الی 18.5 ولت (توصیه 18V)

محدوده دما: 5- الی 85 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت RS485 آسنکرون
لایه فیزیکی: RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت RS485 آسنکرون
لایه فیزیکی: RS485 Multi Drop Bus
کد شناسایی: 254 کد از 0 تا 253
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: چرخدنده کاملاً فلزی، بدنه از جنس پلاستیک خاص


