کیت رباتیک ROBOBUILDER
پیشروبات نماینده رسمی ROBOBUILDER در ایران

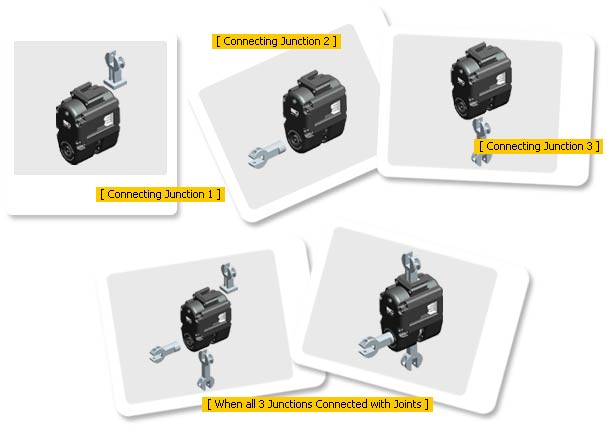
شرکت ROBOBUILDER مبدع به کارگیری مفصل در سروموتورهای روباتیک، میباشد. روش اتصال مفصلی، از ساختار مفصلهای بدن انسان الهام گرفته شده است و راحتی نصب از ویژگیهای آن میباشد. هر سروموتور wCK دارای سه محل جهت اتصال مفصل میباشد و به کمک آن میتوان بسیاری از ساختارهای مکانیکی و مکانیزمهای کاربردی در روباتها را ایجاد نمود. بدین ترتیب سرعت ساخت روبات افزایش مییابد به گونهای که یک آدم نمای ۱۶ سروموتوری را در یک ساعت میتوان اسمبل نمود. در نتیجه از بار مکانیکی کاسته میشود و محققان میتوانند راحتتر به جنبههای کنترلی و برنامهنویسی روبات بپردازند.

کیتهای ROBO BIULDER
RoboBuilder is a new robotic DIY kit designed for robotizen’s value of Education and Entertainment.
Any user with age 14 and up can enjoy designing and building robots simply by plugging and screwing block-type robotic actuator modules.
Various robotic platforms are designable with user’s creative ideas and skills.
Download fancy robotic motion files form Internet and play HUNO, DINO, DOGY the Standard Platforms
ویژگیها
01. Attractive Design
- High tech Robot with Attractive Design
- Customize unique Robot with optional accessories.
02. Creative Building- Create Various Robots enabled by Block-type Robotic Module
- Create Robot Designing realized by Joint Insert Building Scheme
03.Educational Kit
- Educational DIY Kit for Robotic Technology Training
- Training of Precise PID Motion Control
04. Quick & Simple Joint-Assembly
- Internationally Patented Joint Insert Building Structure
- Building completed within 1 hour
05. Robot File Sharing
- Share Robotic Files on Internet
- File Sharing realized by Precise Motion Control Technology
06. Entertaining Pal
- Various Games Supported by Quick & Splendid Robotic Motions
- Catalyst for Robotic Culture & Community
7.Competitive Price
- Most Price Competitive Robotic DIY Kit in the World
- Maximum Value for global Robotizes at Lowest Cost
- High tech Robot with Attractive Design
- Customize unique Robot with optional accessories.
02. Creative Building- Create Various Robots enabled by Block-type Robotic Module
- Create Robot Designing realized by Joint Insert Building Scheme
03.Educational Kit
- Educational DIY Kit for Robotic Technology Training
- Training of Precise PID Motion Control
04. Quick & Simple Joint-Assembly
- Internationally Patented Joint Insert Building Structure
- Building completed within 1 hour
05. Robot File Sharing
- Share Robotic Files on Internet
- File Sharing realized by Precise Motion Control Technology
06. Entertaining Pal
- Various Games Supported by Quick & Splendid Robotic Motions
- Catalyst for Robotic Culture & Community
7.Competitive Price
- Most Price Competitive Robotic DIY Kit in the World
- Maximum Value for global Robotizes at Lowest Cost

| مدل | رنگ | تعداد سروموتور | سنسور صدا | سنسور فاصله سنج | صدا | نوع ارتباط |
| RBK-5710K | مشکی | 16 | Y | N | N | IR Remote Control, Expandable for Bluetooth |
| RBK-5720T-S02 | بی رنگ | 16 | Y | Y | Y | IR Remote Control, Expandable for Bluetooth |
| RBK-5710K-E02 | مشکی | 8 | Y | Y | N | IR Remote Control, Expandable for Bluetooth |
| RBK-5730K | مشکی | 20 | Y | Y | Y | IR Remote Control, Bluetooth |
موتورهای wCK
- Communication Multi drop Full Duplex UART serial communication
- Baud Rate 4,800bps ~ 921,600bps(8 levels)
- Extension Max 254 modules per channel (ID 0~253)
- Operating Voltage 6VDC ~ 10VDC (7.4VDC~8.4VDC recommended)
- Speed Max No Load Speed 0.15 sec/60° (wCK-1108 under recommended voltage)
- Stall Torque Max 13kg·cm (wCK-1413 under recommended voltage)
- Max Power 1.1W (wCK-1108, 1111), 1.4W (wCK-1413)
- Gear Ratio 1/173 (wCK-1108), 1/241 (wCK-1111, 1413)
- Control Mode Position Control, Speed Control, Torque Control
- Control Angle 0~254 (Standard Resolution), 0~1,022 (High Resolution)
- Operating Angle 0°~269° (Standard Resolution), 0°~333° (High Resolution)
- Resolution 8 bit/1.055° (Standard Resolution), 10 bit/0.325° (High Resolution)
- Error Range ±0.8° (Standard Resolution)
- Speed Level 30 levels(Position Control Mode), 16 levels (Wheel Mode)
- Case Material Engineering Plastic
- Gear Material POM (wCK-1108), POM + Metal (wCK-1111,1413)
- Size 51.6 mm x 27.1 mm x 36.4 mm
- Weight 45g (wCK-1108), 49g (wCK-1111,1413)