PishRobotino | |||
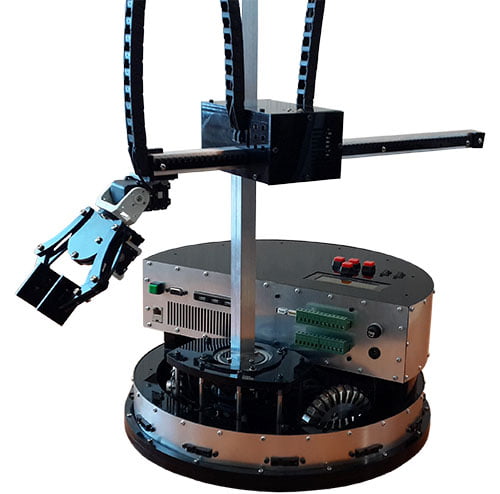
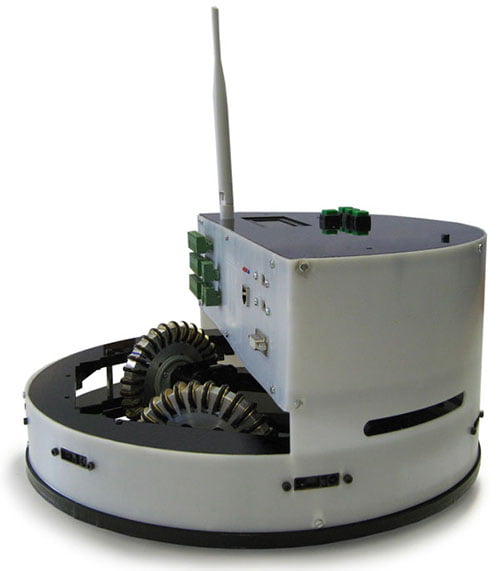
PishRobotiono, a product of Hushmand Afzar, is a Mobile Robot Platform proper for R&D in Academic Centers and Laboratories as well as Robotic Competitions as a @Work Robot, Warehouse Robot, Hockey Playing Robot and ... . PishRobotiono can move freely in all directions (Omnidirectional Drive) and its mobility is based on the new generation of Dynamixel Actuators (MX series). The main controller of PishRobotino is a lightweight PC with a powerful Intel Celeron Dual-core Sandy Bridge Processor inside and a processing speed of 1.1GHZ. Using this PC, camera and sensors of PishRobotino, users could easily make a completely automatic Mobile Robot. Wireless communication to other systems could be made using its built-in computer. Another PC could remotely connect to its built-in PC. PishRobotino could be programmed using VB, C++, C# and .Net programming languages. This robot that was inspired from FESTO's Robotino at the beginning, now is more advanced than Robotino in some aspects. |
 | ||
| |||
| |||