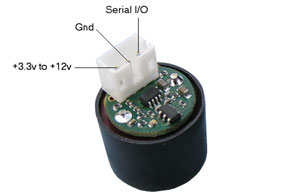
فاصلهياب اولتراسونیک (آلتراسونیک)
محدوده عملکرد: ۱۸ سانتیمتر تا ۶ متر (بدون کالیبراسیون)
محدوده عملکرد: صفر سانتیمتر تا ۶ متر (بعد از کالیبراسیون خودکار)
ولتاژ: 12 ~ 3.3 ولت
جریان: ۲۵ میلیآمپر در حال کار، ۱۱ میلیآمپر در حالت standby و ۵۵ میکروآمپر در حالت sleep
فرکانس: ۴۰ کیلوهرتز
نوع ارتباط: اتصال سریال تک پایه با سرعت ۹۶۰۰ (با این روش تا ۱۶ عدد SRF01 را میتوان به یک پین میکروکنترلر متصل نمود.)
گزارش: در واحد سانتیمتر یا اینچ
وزن بسیار سبک: 2.7 گرم
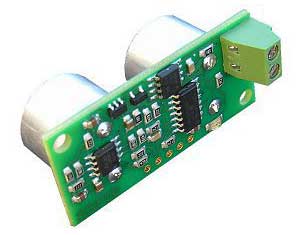
علاوه بر این دستورات جدید اجازه کنترل مجزای سیگنال burst و فاصله عملکرد را میدهد.
محدوده عملکرد: ۱۶ سانتیمتر تا ۶ متر
تغذیه: ولتاژ ۵ ولت، جریان نامی ۴ میلیآمپر
فرکانس: ۴۰ کیلوهرتز
ابعاد: ارتفاع ۱۷ × ۲۰ × ۲۴ میلیمتر
بهره آنالوگ: کنترل بهره به صورت اتوماتیک در ۶۴ گام
نوع ارتباط:
روش ۱: اتصال I2C استاندارد
روش ۲: امکان اتصال تا ۱۶ دستگاه به سریال پورت ریزپردازنده یا UART
تنظیم کاملاً خودکار: بدون نیاز به کالیبراسیون
محاسبه دقیق اکو و گزارش نتیجه: کنترل کننده متصل به این ماژول نیازی به اندازهگیری و محاسبه فاصله ندارد.
گزارش: در واحد میکروثانیه، میلیمتر یا اینچ
وزن سبک: 4.6 گرم

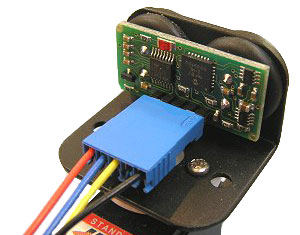
تغذیه: ۵ ولت، جریان نامی ۴ میلیآمپر
فرکانس: ۴۰ کیلوهرتز
ابعاد: ارتفاع ۱۷ × ۲۰ × ۴۳
روشهای کارکرد: یک پین برای ارسال دستور فعال سازی (trig) و دریافت اکو (انعکاس صدا) یا دو پین مجزا برای هر سیگنال (سازگار با ماژول SRF04) سیگنال trig باید از نوع TTL و به طول حداقل ۱۰ میکروثانیه باشد.
پالس اکو از نوع TTL با سطح مثبت است و پهنای پالس متناسب با فاصله جسم از سنسور میباشد.

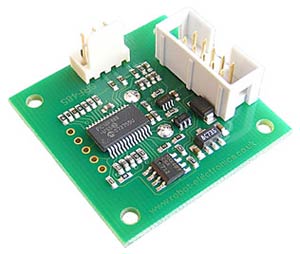
تغذیه: حلقه جریان ۴ تا ۲۰ میلیآمپر
فرکانس: ۴۰ کیلوهرتز
ابعاد: ۲۰ × ۴۳ میلی متر
جریان نامی: ۱۵ میلیآمپر (۳ میلیآمپر در حالت Standby)
فرکانس: ۴۰ کیلوهرتز
محدوده عملکرد: بین ۳ سانتیمتر تا ۶ متر
حداکثر بهره آنالوگ: متغییر بین ۹۴ تا ۱۰۲۵ در ۳۲ گام
نوع ارتباط: استاندارد I2C
سنسور نوری: برای اندازهگیری نور پیش روی سنسور
محاسبه دقیق اکو و گزارش نتیجه: کنترل کننده متصل به این ماژول نیازی به اندازهگیری و محاسبه فاصله ندارد.
بررسی چندین اکو: ادامه بررسی اکوها بعد از دریافت اولین اکو
گزارش: در واحد میکروثانیه، میلیمتر یا اینچ
ابعاد: ارتفاع ۱۷ × ۲۰ × ۴۴ میلیمتر

جریان نامی: ۱۵ میلیآمپر (۳ میلیآمپر در حالت Standby)
فرکانس: ۴۰ کیلوهرتز
محدوده عملکرد: ۶ سانتیمتر تا ۶ متر
حداکثر بهره آنالوگ: متغییر بین ۴۰ تا ۷۰۰ در ۱۶ گام
نوع ارتباط: استاندارد I2C
محاسبه دقیق اکو و گزارش نتیجه: کنترل کننده متصل به این ماژول نیازی به اندازهگیری و محاسبه فاصله ندارد.
گزارش: در واحد میکروثانیه، میلیمتر یا اینچ
ابعاد: ارتفاع ۱۰ × ۱۵ × ۳۲ میلیمتر

محدوده عملکرد: 10 سانتیمتر تا 1.2 متر
تغذیه: ۵ ولت
فرکانس: ۲۳۵ کیلوهرتز
پهنای پرتو: فقط ۱۵ درجه
نوع ارتباط: استاندارد I2C
محاسبه دقیق اکو و گزارش نتیجه: کنترل کننده متصل به این ماژول نیازی به اندازهگیری و محاسبه فاصله ندارد.
گزارش: در واحد میکروثانیه، میلیمتر یا اینچ
ابعاد: ارتفاع ۱۹ × ۲۰ × ۳۴ میلیمتر

این فاصلهیاب دارای ۳ نمایشگر LED قابل برنامهریزی توسط کاربر میباشد.
ولتاژ: 8 تا 14 ولت (ولتاژ نامی 12 ولت)
جریان نامی: 10 میلیآمپر
فرکانس: 40 کیلوهرتز
محدوده عملکرد: 30 سانتیمتر تا 5متر
نوع ارتباط: استاندارد RS485 (تا 127 عدد SRF485 را میتوان به کنترلر متصل نمود.)
گزارش: در واحد میکروثانیه، سانتیمتر یا اینچ
جبران دما: 30- تا 50+ درجه سانتیگراد
ولتاژ: 8 تا 14 ولت (ولتاژ نامی 12 ولت)
جریان نامی: 10 میلیآمپر
فرکانس: 40 کیلوهرتز
محدوده عملکرد: 60 سانتیمتر تا 5 متر
نوع ارتباط: استاندارد RS485 (تا 127 عدد SRF485WPR را میتوان به کنترلر متصل نمود.)
گزارش: در واحد میکروثانیه، سانتیمتر یا اینچ
جبران دما: 30- تا 50+ درجه سانتیگراد

سنسور قطب نما، شتاب سنج و جایرو
ولتاژ: 3.6 تا 5 ولت
جریان نامی: 35 میلی آمپر
دقت: 0.1 درجه
صحت: زیر 2% بعد کالیبراسیون
سطح سیگنال: 3.3 ولت با قابلیت تحمل 5 ولت برای اتصال به سطح منطق 5V
خروجی ۱: استاندارد I2C، تا سرعت 100KHZ
خروجی ۲: اتصال سریال با سرعت 9600 و 19200 و 38400

جریان نامی: ۲۵ میلی آمپر
دقت: 0.1 درجه
صحت: ۳ تا ۴ درجه (بعد از کالیبره کردن)
خروجی ۱: پالس pwm از ۱ تا ۳۷ میلی ثانیه با نمو 0.1 میلی ثانیه
خروجی ۲: استاندارد I2C، سازگار با SMBUS، صفر تا ۲۵۵ و صفر تا ۳۵۹۹۰، سرعت SCL تا یک مگاهرتز
ابعاد: ۳۵×۳۲ میلیمتر

دوربین
سیستم پردازش تصویر کوچک، سریع، قابل استفاده آسان، ارزان و قابل دسترس
دارای قابلیت یادگیری جهت تشخیص اشیاء آموزش داده شده
ارسال خروجی اشیاء یافت شده با سرعت ۵۰ بار در ثانیه
قابلیت اتصال توسط کابل ارائه شده با Arduino و همچنین Raspberry Pi، BeagleBone و کنترلرهای مشابه
دارای کتابخانههای کامل برای Arduino و Raspberry Pi و غیره
پشتیبانی از ++ C/C و Python
قابلیت ارتباط از طریق واسطهای مختلف نظیر SPI ، I2C، UART، USB یا خروجی آنالوگ و دیجیتال
ابزار پیکربندی در محیط های Windows ، MacOS و Linux
دارای firmware ها و نرمافزارهای متن باز با لیسانس GNU
دارای تمام اطلاعات سختافزاری شامل شماتیکها، لیست قطعات استفاده شده، PCB layout و ...
مشخصات فنی:
پردازنده: NXP LPC4330, 204 MHz, dual core
سنسور تصویر: Omnivision OV9715, 1/4", 1280x800
زاویهی دید لنز: ۷۵ درجه افقی، ۴۷ درجه عمودی
نوع لنز: استاندارد M12
میزان مصرف: ۱۴۰ میلی آمپر
ورودی تغذیه: ورودی 5 ولت USB یا ورودی رگوله نشده 6 تا 10 ولت
حافظه: ۲۶۴ کیلوبایت
فلش: ۱مگابایت
خروجیها: UART serial, SPI, I2C, USB, digital, analog
ابعاد: 5.33x5.08x3.56 سانتی متر
وزن: ۲۷ گرم
لطفاً برای دریافت آخرین اطلاعات و راهنمای استفاده از ماژول به لینک http://www.cmucam.org/projects/cmucam5 مراجعه نمایید.

کاملاً open source و قابل برنامه ریزی مجدد از طریق Propeller Tool
دارای اتصالات سازگار با Arduino
سنسور رنگ RGB با رزولوشن 640x480
سرعت پردازش تصویر 10 فریم بر ثانیه
ارسال تصاویر خام از طریق سریال یا ذخیره بر روی کارت فلش
پردازشگر تصویر بر روی بورد (QQVGA 160x120)
دنبال کردن لکههای رنگی در فضای RGB/YUV
Mean, median, mode and standard deviation data collection
Segmented (thresholded) image capture for tracking visualization (over serial or to flash card) 80x60 image resolution
Monochrome color space
تشکیل هیزتوگرام
امکان برش دلخواه تصویر
µSD/µSDHC/µSDXC flash card slot with FAT16/32 full file system driver support w/ Directory and File manipulation
Two-port servo controller (pan and tilt w/ 1us resolution at a 50 Hz refresh rate) Pan and/or Tit servo channels can be configured as GPIOs
Indicator user controllable LED (red) and power LED (green)
TTL UART (up to 115200 baud , 19200 baud by default)
Monochrome baseband analog video output (NTSC/PAL) of 160x120 resolution for tracking visualization (segmented (thresholded)
image w/ color centroid and bounding box overlay at 30 FPS)
CMUcam4 GUI for viewing images on the PC.
لطفاً برای دریافت آخرین اطلاعات و راهنمای استفاده از ماژول به لینک http://www.cmucam.org/projects/cmucam4 مراجعه نمایید.

کاملاً open source و قابل برنامه ریزی از طریق GCC
سنسور رنگ RGB با رزولوشن CIF 352x288
محیط برنامه ریزی open source برای ویندوز و لینوکس
دارای محل اتصال حافظه MMC و SD با پشتیبانی درایور FAT16
دارای چهار پورت برای کنترل سروموتور
سرعت پردازش تصویر 26 فریم در ثانیه
پشتیبانی زبان برنامه نویسی سبک Lua
فشرده سازی نرم افزاری JPEG
دارای Library اولیه جهت کار با تصویر:
برش تصویر به اندازه دلخواه
کاهش رزولوشن تصویر
دارای توابع Threshold و Convolution
فضاهای رنگ RGB و YCrCb و HSV
شبیه سازی CMUCAM2:
تعریف محدوده های رنگی و تشخیص آن
یافتن اختلاف فریم ها
محاسبه میانگین و واریانس اطلاعات
ارسال تصویر خام از طریق پورت سریال
تولید Histogram
خروجی ویدیوی آنالوگ سیاه و سفید (PAL یا NTSC)
بافر FIFO برای تصویر، جهت پردازش چند مرحله ای تصاویر با رزولوشن بالا
دارای واسط شبکه بیسیم 802.15.4 :
ارتباط Tmote Sky یا Telos
دوربین مجازی برای شبیه سازی ارسال تصاویر CMUCAM3 به کامپیوتر
برنامه CMUCAM3-Frame-Grabber جهت مشاهده تصاویر در کامپیوتر
دوربین مجازی برای شبیه سازی ارسال تصاویر CMUCAM3 به کامپیوتر
برنامه CMUCAM3-Frame-Grabber جهت مشاهده تصاویر در کامپیوتر

این ماژول با بهره گیری از یک دوربین OmniVision از نوع VGA به همراه تراشه فشرده سازی JPEG یک دوربین کم مصرف و مقرون به صرفه میباشد که در دو نوع uCAM-TTL و uCAM-RS232 عرضه میشود. نوع uCAM-TTL دارای واسط سریال جهت اتصال به UART یک میکروکنترلر یا نظایر آن میباشد و نوع uCAM-RS232 را میتوان به یک پورت سریال از نوع RS232 نظیر سریال پورت کامپیوتر متصل نمود.
تغذیه: تغذیه 3.3VDC در uCAM-TTL و 5VDC در uCAM-232
سرعت: معادل 1.2Mbps برای UART
دوربین: سنسور رنگی VGA از نوع OmniVision OV7640/8 و JPEG CODEC برای رزولوشنهای مختلف
امکانات مدارات داخلی: دارای امکانات down sampling و clamping و windowing برای رزولوشنهای VGA و QVGA و 160x120 و 80x60
امکانات مدارات تبدیل رنگ: دارای تبدیل رنگ 2 و 4 و 8 بیت gray و 12 و 16 بیت RGB و JPEG استاندارد

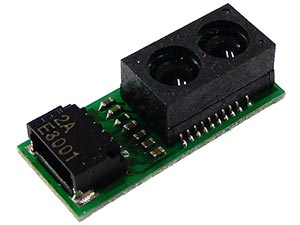
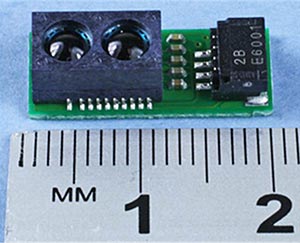
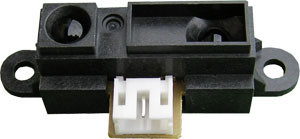
فاصلهیاب مادون قرمز
ولتاژ تغذیه: 2.7 تا 3.3 ولت
خروجی آنالوگ
2.2 تا 0.55 ولت تغییرات در خروجی (از ۴ تا ۵۰ سانتیمتر)
ولتاژ تغذیه: 2.7 تا 3.3 ولت
خروجی دیجیتال I2C
ولتاژ تغذیه: ۵ ولت
خروجی آنالوگ
2 ولت تغییرات در خروجی (از ۱۰ تا ۸۰ سانتیمتر)
ولتاژ تغذیه: ۵ ولت
خروجی آنالوگ
2.25 ولت تغییرات در خروجی (از ۴ تا ۳۰ سانتیمتر)
ولتاژ تغذیه: ۵ ولت
خروجی آنالوگ
1.9 ولت تغییرات در خروجی (از ۱۰ تا ۸۰ سانتیمتر)
ولتاژ تغذیه: ۵ ولت
خروجی آنالوگ
2.05 ولت تغییرات در خروجی (از ۲۰ تا ۱۵۰ سانتیمتر)

ولتاژ تغذیه: ۵ ولت
خروجی آنالوگ
0.7 ولت تغییرات در خروجی (از ۱۰۰ تا ۲۰۰ سانتیمتر) و
1.55 ولت تغییرات در خروجی (از ۲۰۰ تا ۵۵۰ سانتیمتر)

سنسور حرارتی
یک شعله شمع را در محدوده ۲ متری (۶ فوتی) تشخیص میدهد و به نور محیط حساس نمیباشد.
گرمای بدن انسان را تشخیص میدهد.
کنترل سرو برای ایجاد تصویر
ولتاژ: ۵ ولت
جریان نامی: ۵ میلی آمپر (به استثنای سرو)
محدوده درجه حرارت: ۴ تا ۱۰۰ درجه سانتیگراد
صحت (Full FOV): از ۱۰ تا ۱۰۰ درجه سانتیگراد ۲ -/+ یا ۲٪ -/+
صحت (Full FOV): از ۴ تا ۱۰ درجه سانتیگراد ۳ -/+ درجه سانتیگراد
میدان دید: ۶ × ۴۱ درجه (متشکل از ۸ پیکسل تقریباً ۶ × ۵ درجهای)
خروجیها: دمای محیط به همراه دمای ۸ پیکسل
نوع ارتباط: استاندارد I2C
سرو: کنترل سرو در ۳۲ گام تا ۱۸۰ درجه چرخش
ابعاد بسیار کوچک: ۱۸ × ۳۱ میلیمتر

جریان تغذیه: 6 میکرو آمپر (به طور نوعی)
خروجی: 10.0mV/°C (به طور نوعی)
خروجی در صفر درجه سانتیگراد: 500mV
محدوده عملکرد: 40- تا 125+ سانتیگراد
صحت (درجه سانتیگراد): 1 ± (به طور نوعی)، 2 ± (حداکثر)، در محدوده 0 تا 70+ سانتیگراد
کنترلر ربات
تغذیه مدار از طریق پورت USB با جریان 80mA صورت میگیرد. در نتیجه میتوان از پورت USB استاندارد 100mA دیگر برای سایر قسمتهای مدار استفاده نمود.
سرعت پروسسور: 12MIPS
وجود برنامه های نمونه برای آشنایی و بهره گیری سریع از ماژول.
پین Reset قابل انتخاب برای بوت لودر یا برنامه اصلی.
سازگار با ابزار و برنامه های رایگان Microchip.

میکروکنترلر: PIC32MX795F512H
نوع پردازنده: ۳۲ بیت
سرعت پروسسور: 80MIPS
فلش: 512k
حافظه: 128k
میکروکنترلر: PIC24FJ256GB206
نوع پردازنده: ۱۶ بیت
سرعت پروسسور: 16MIPS
فلش: 256k
حافظه: 96k

میکروکنترلر: PIC24FJ256GB206
نوع پردازنده: ۸ بیت
سرعت پروسسور: 12MIPS
فلش: 128k
حافظه: 3.9k
GP2.0 در حال حاضر بر روی سیستمهای عامل Windows و MacOS X و Linux پشتیبانی شده است و از طریق برنامههایی که توسط Acroname ارائه شده است قابل دسترسی است. همچنین این ماژول دارای SDK برای زبانهای C و Java میباشد.
امکانات مشترک GP2.0 با GP1.0:
پردازنده: پروسسور 40MHZ RISC
ورودی آنالوگ: 5 کانال 10 بیت
پورت I2C: سرعت 1MBitبا قابلیت routing
نمایش وضعیت ضربان سیستم: به کمک LED
تعداد برنامههای TEA همزمان: تا 4 عدد
سریال پورت: از نوع UART
تعداد خروجیهای سروموتور دقت بالا: 4 عدد
سرعت اجرای دستورات: 9000 دستور در ثانیه
دسترسی به امکانات ورودی خروجی: از طریق مجموعه دستورات سریال (در نظر گرفته شده درون سیستم)
اتصالات مناسب تغذیه مثبت و منفی برای هر پین ورودی خروجی
امکانات جدید GP2.0:
پروتکل ورودی خروجی مادون قرمز: NEC یا RC5
فضای برنامه: 1 برنامه 16k و 11 برنامه 1k از نوع TEA
سوراخهای قابل لحیم کاری: برای 3 ورودی خروجی دیجیتال، 2 آنالوگ، I2C و تغذیه
محدوده ولتاژ تغذیه: 3.2V تا 28V
خروجی تغذیه: 5V و 1A بدون توجه به ولتاژ تغذیه
تغذیه سروموتور: قابل انتخاب برای استفاده از تغذیه داخلی بورد یا استفاده از تغذیه مجزا
دارای کلید روشن خاموش و نمایشگر LED برای اخطار باطری ضعیف
مبدل
ماژول USB-I2C یک رابط کامل بین کامپیوتر شما و باس I2C میباشد. ماژول به وسیله کابل USB به منبع تغذیه وصل میشود و تا ۷۰ میلیآمپر جریان در ولتاژ ۵ ولت برای مدار خروجی (از یک پورت استاندارد USB) فراهم مینماید.
دستگاههای I2C: هر نوع دستگاه ثبت شده یا ثبت نشده I2C
درایورهای موجود: برای سیستم عاملهای ویندوز XP64, XP, 2000, ME, 98, CE.NET V4.2 و همچنین سیستم عاملهای Linux, Mac OS8, OS9, OSX ولتاژ: ۵ ولت از طریق پورت USB (نیازی به منبع تغذیه خارجی ندارد.)
جریان خروجی: تا ۷۰ میلیآمپر (برای مداری که طراحی نمودید.)
مقاومتهای Pull-up روی بورد: 4.7 کیلواهم
ورودی خروجی دیجیتال: ۱ عدد ورودی و ۲ عدد ورودی خروجی دیجیتال برای زمانی که از I2C استفاده نمیشود.
ورودی آنالوگ: ۲ عدد ورودی آنالوگ ۱۰ بیت برای زمانی که از I2C استفاده نمیشود.


به کمک فرستنده گیرنده قدرتمند MAX487 میتوان تا ۱۲۸ دستگاه بر روی یک باس قرارداد.
این مبدل از تراشه FTDI استفاده میکند که دارای درایور برای سیستم عاملهای ویندوز XP64, XP, 2000, ME, 98, CE.NET V4.2 و همچنین سیستم عاملهای Linux , Mac OS8, OS9, OSX میباشد.

ماژول بی سیم
سرعت ارتباط بی سیم: 19200bps
فرکانس:
فرکانس RF04-400 و CM02-400 برابر 433.92MHZ
فرکانس RF04-900 و CM02-900 برابر 869.85MHZ
محدوده عملکرد: ۲۵۰ متر خط دید، تا ۱۵۰ متر برای RF04-900 و CM02-900
تغذیه بورد RF04: از طریق پورت USB
بافر اطلاعات RF04: برابر ۱۲۸ بایت بافر درونی بورد
تغذیه بورد CM02: باطری یا منبع تقذیه ۶ تا ۱۲ ولت
نوع ارتباط CM02: استاندارد I2C

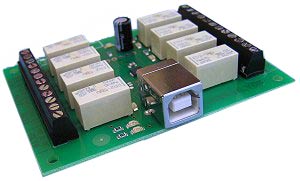
ماژول رله USB
تعداد رله: ۲
تغذیه بورد: از طریق پورت USB
واسط کنترل: پورت USB
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

رلههای استفاده شده در این بورد از نوع کویل بسیار کم مصرف 50 میلی وات میباشد.
تعداد رله: 2 عدد
تغذیه بورد: از طریق پورت USB
واسط کنترل: پورت USB
حداکثر جریان رله: 1 آمپر در 30VDC یا 60VAC و 500 میلی آمپر در 110VAC و 250 میلی آمپر در 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

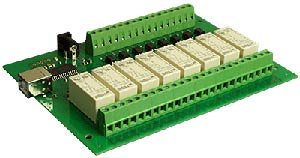
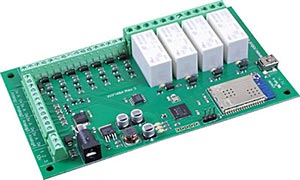
تعداد رله: ۸ عدد
تغذیه بورد: از طریق پورت USB
واسط کنترل: پورت USB
حداکثر جریان رله:
1 آمپر در 30VDC یا 60VACC
500 میلی آمپر در 110VACC
250 میلی آمپر در 250VACC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک
تعداد رله: ۸ عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
واسط کنترل: پورت USB
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

تعداد رله: ۸ عدد
تغذیه بورد: از طریق پورت USB
واسط کنترل: پورت USB
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

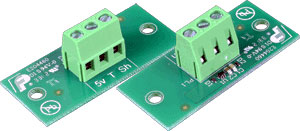
ورودی فرمان: ورودی آنالوگ 0 تا 5 ولت یا امکان ارتباط مستقیم با فاصلهیابهای اولتراسونیک
تعداد رله: 2 عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
تنظیمات: از طریق پورت Mini USB
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

تعداد ورودیهای ایزوله شده: ۸ عدد
نوع ایزوله ورودی: نوری
محدوده ولتاژ ورودی: 4.5VDC تا 27VDC
تعداد رله خروجی: ۸ عدد
تغذیه بورد: از طریق پورت USB
واسط کنترل: پورت USB
حداکثر جریان رله:
1 آمپر در 30VDC یا 60VACC
500 میلی آمپر در 110VACC
250 میلی آمپر در 250VACC
نوع اتصال ورودی: ترمینال پیچی برای مثبت و منفی
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

تعداد ورودیهای ایزوله شده: ۸ عدد
نوع ایزوله ورودی: نوری
محدوده ولتاژ ورودی: 4.5VDC تا 27VDC
تعداد رله خروجی: ۸ عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
واسط کنترل: پورت USB
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال ورودی: ترمینال پیچی برای مثبت و منفی
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک
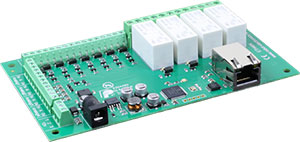
ماژول رله Ethernet
تعداد رله: ۲ عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
واسط کنترل: پروتکل HTTP و از طریق صفحه وب یا پروتکل TCP/IP و از طریق اترنت
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

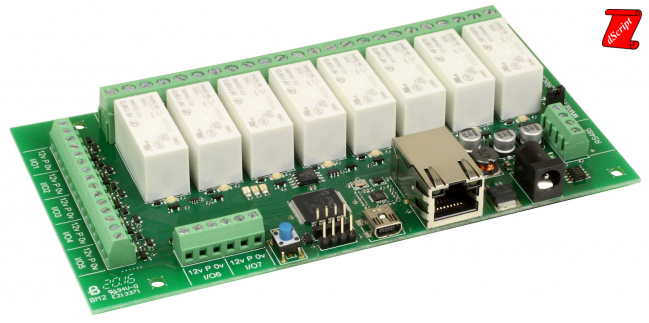
تعداد رله: ۸ عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
واسط کنترل: پروتکل HTTP و از طریق صفحه وب یا پروتکل TCP/IP و از طریق اترنت
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

تعداد ورودی آنالوگ: ۴ عدد
تعداد ورودی/خروجی دیجیتال: ۸ عدد
تعداد رله: ۴ عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
واسط کنترل: پروتکل HTTP و از طریق صفحه وب یا پروتکل TCP/IP و از طریق اترنت
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک
تعداد ورودی آنالوگ: ۸ عدد
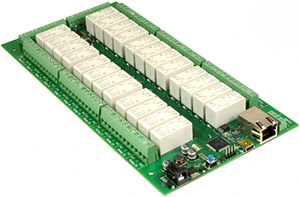
تعداد رله: ۲۰ عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
واسط کنترل: پروتکل HTTP و از طریق صفحه وب یا پروتکل TCP/IP و از طریق اترنت
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

تعداد رله: ۴ عدد Solid State با قابلیت دیمری
تغذیه بورد: 230VAC نامی با فرکانس 50/60 هرتز
واسط کنترل: پروتکل HTTP و از طریق صفحه وب یا پروتکل TCP/IP و از طریق اترنت
حداکثر جریان رله: 5 آمپر
حداکثر جریان ماژول: 10 آمپر (محافظت شده با فیوز)
نوع اتصال رله: ترمینال پیچی برای کنتاکت E ،N و L
توجه: میتوانید از app های رایگان آندروید و آیفون برای کنترل این ماژول استفاده نمایید.

تعداد خروجی سوئیچینگ دیجیتال: ۲ عدد
کنترلر موتور DC: یک عدد موتور 24V 5A
تعداد رله: ۲ عدد 16Amp @24vdc یا 250vac
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 24VDC
واسط کنترل: پروتکل HTTP و از طریق صفحه وب یا پروتکل TCP/IP و از طریق اترنت
نوع اتصال رله: ترمینال پیچی برای کنتاکت تمام I/O ها
توجه: میتوانید از app های رایگان آندروید و آیفون برای کنترل این ماژول استفاده نمایید.

تعداد پورت سریال: ۳ عدد
تعداد ورودی/خروجی سوئیچینگ دیجیتال: ۸ عدد
تعداد ورودی آنالوگ: ۴ عدد
تعداد رله: ۴ عدد رله 16 آمپر 24VDC یا 250VAC
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
نوع اتصال: از طریق پورت اترنت RJ45 برای اتصال معمولی و USB برای برنامهنویسی
نوع اتصال رله: ترمینال پیچی برای کنتاکت تمام I/O ها

تعداد پورت سریال: یک عدد پورت سریال TTL، یک عدد پورت سریال RS485
ورودی و خروجی: 8 کانال انعطاف پذیر، قابل انتخاب بین ورودی VFC، خروجی NPN یا ورودی آنالوگ 12 بیت
تعداد رله: ۲۴ عدد رله 16 آمپر 24VDC یا 250VAC
تغذیه بورد: از طریق جک 2.1mm با ولتاژ 12VDC
نوع اتصال: از طریق پورت اترنت RJ45 برای اتصال معمولی و USB برای برنامهنویسی
نوع اتصال رله: ترمینال پیچی برای کنتاکت تمام I/O ها
تعداد پورت سریال: ۱ عدد
تعداد ورودی/خروجی سوئیچینگ دیجیتال: ۴ عدد
تعداد ورودی آنالوگ: ۲ عدد
تعداد رله: ۲ عدد رله 16 آمپر 24VDC یا 250VAC
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
نوع اتصال: از طریق پورت اترنت RJ45 برای اتصال معمولی و USB برای برنامهنویسی
نوع اتصال رله: ترمینال پیچی برای کنتاکت تمام I/O ها

تعداد پورت سریال: دو عدد پورت سریال TTL، یک عدد پورت سریال RS485
تعداد رله: 8 عدد
تغذیه بورد: از طریق جک 2.1mm با ولتاژ 12VDC
ورودی و خروجی: 7 کانال انعطاف پذیر، قابل انتخاب بین ورودی VFC، خروجی NPN یا ورودی آنالوگ 10 بیت
ارتباط : برنامه ریزی از طریق USB و دسترسی معمول ار طریق اترنت RJ45
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک

ماژول رله WiFi
تعداد ورودی/خروجی دیجیتال: ۸ عدد
تعداد رله: ۴ عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک
قابلیت تنظیم WIFI از طریق پورت USB
دارای رابط HTTP برای پیکربندی و تست
دارای رابط کنترل بر پایهی پروتکل TCP/IP
قابلیت گزارش تغییر در ورودیها با ارسال ایمیل
امکان تنظیم ورودیها برای کنترل خروجی دیگر بر روی ماژولهای دیگر WIFI یا ETH در هر کجای دنیا که با هم بتوانند از طریق یک شبکه، اتصال برقرار کنند
توجه: میتوانید از app های رایگان آندروید و آیفون برای کنترل این ماژول استفاده نمایید.
تعداد رله: ۲۰ عدد
تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک
قابلیت تنظیم WIFI از طریق پورت USB
دارای رابط HTTP برای پیکربندی و تست
دارای رابط کنترل بر پایهی پروتکل TCP/IP
توجه: میتوانید از app های رایگان آندروید و آیفون برای کنترل این ماژول استفاده نمایید.

تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
دارای رابط HTTP برای پیکربندی و تست
دارای رابط کنترل بر پایهی پروتکل TCP/IP
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک
توجه: میتوانید از app های رایگان آندروید و آیفون برای کنترل این ماژول استفاده نمایید.

تغذیه بورد: از طریق منبع تغذیه مجزا با ولتاژ 12VDC
دارای رابط HTTP برای پیکربندی و تست
دارای رابط کنترل بر پایهی پروتکل TCP/IP
حداکثر جریان رله: 16 آمپر در 24VDC یا 250VAC
نوع اتصال رله: ترمینال پیچی برای کنتاکت N/O و N/C و مشترک
توجه: میتوانید از app های رایگان آندروید و آیفون برای کنترل این ماژول استفاده نمایید.

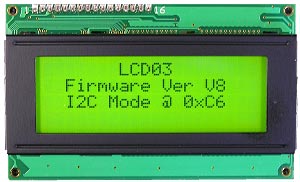
صفحه نمایش سریال
ولتاژ: 5 ولت
جریان نامی: 125 میلیآمپر برای نوع 20x4 و 75 میلیآمپر برای نوع 16x2(با نور پس زمینه روشن)
نوع ارتباط: I2C یا سریال 9600 بیت در ثانیه
کلیدها: قابل اتصال به یک صفحه کلید متشکل از ماتریس 3x4 از کلیدها
کاراکترهای دلخواه: 8 کاراکتر دلخواه به سادگی قابل تعریف است.
رنگ صفحه: ارائه شده در دو رنگ سبز و آبی
حالت پیش فرض نور پسزمینه خاموش میباشد که به کمک نرمافزار میتوان آن را روشن نمود.



انواع موتور و درايور موتور
ولتاژ: 12 ولت
گشتاور: 1.5 کیلوگرم سانتیمتر
سرعت: 170 دور در دقیقه
جریان نامی: 530 میلیآمپر
سرعت درحالت بدون بار: 216
جریان در حالت بدون بار: 150 میلیآمپر
جریان در حالت توقف (بر اثر گیرکردن): 2.5 آمپر
توان خروجی: 4.22 وات
تعداد پالس انکدر در هر دور شفت: 360
توجه: تعداد پالس هر یک از سیگنالهای A و B انکدر برابر 90 پالس کامل با اختلاف فاز 90 درجه میباشد که با ترکیب این دو سیگنال و همچنین استفاده از هر دو لبه بالارونده و پایین رونده آنها میتوان به رزولوشن 360 پالس رسید.

ولتاژ: 24 ولت
گشتاور: 16 کیلوگرم سانتیمتر
سرعت: 122 دور در دقیقه
جریان نامی: 2100 میلیآمپر
سرعت درحالت بدون بار: 143
جریان در حالت بدون بار: 500 میلیآمپر
جریان در حالت توقف (بر اثر گیرکردن): 13 آمپر
توان خروجی: 37.4 وات
تعداد پالس انکدر در هر دور شفت: 980
توجه: تعداد پالس هر یک از سیگنالهای A و B انکدر برابر 245 پالس کامل با اختلاف فاز 90 درجه میباشد که با ترکیب این دو سیگنال و همچنین استفاده از هر دو لبه بالارونده و پایین رونده آنها میتوان به رزولوشن 980 پالس رسید.

ولتاژ: ۵ ولت برای مدار کنترل و ۲۴ - ۵ ولت برای تغذیه موتور
جریان: حداکثر ۵۰ میلیآمپر برای مدار کنترل و ۲۰ آمپر برای موتور
کنترل ۱: 0، 2.5 و 5 ولت آنالوگ برای حرکت به عقب، حالت توقف و حرکت به جلو
کنترل ۲: ۵ - ۰ ولت (یا معادل PWM) با کنترل جهت مجزا
کنترل ۳: مد RC کنترل شده بوسیله سیستم کنترل رادیویی استاندارد، ارتباط مستقیم با گیرنده RC (پالس ۱ تا ۲ میلی ثانیه با حالت توقف در 1.5 میلیثانیه)
کنترل ۴: استاندارد I2C، کنترل کامل، گزارش شتاب و وضعیت، افزایش تا ۸ ماژول بر روی باس، سرعت SCL تا ۱ مگاهرتز قابل افزایش است.
محدودکننده جریان: تنظیم شده بر روی ۲۰ آمپر
محدودکننده درجه حرارت: کاهش مناسب توان در صورت افزایش بیش از حد دما
ابعاد: ۳۰ × ۵۲ × ۱۱۳ میلی متر
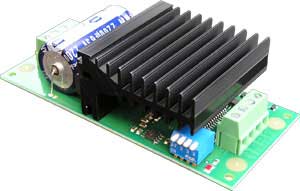
ولتاژ: ۲۴ ولت برای مدار کنترل و تغذیه موتور
جریان خروجی: حداکثر ۵ آمپر برای موتور
فرمان حرکت به جلو: ورودی ۵ تا ۲۴ ولت
فرمان حرکت به عقب: ورودی ۵ تا ۲۴ ولت
ابعاد: 102x54x25 میلی متر
ولتاژ: ۵ ولت برای مدار کنترل و ۲۴ - ۵ ولت برای تغذیه موتور
جریان: حداکثر ۵۰ میلیآمپر برای مدار کنترل و ۵ آمپر برای هر موتور
کنترل ۱: دو کانال مجزای 0، 2.5 و 5 ولت آنالوگ برای حرکت به عقب، حالت توقف و حرکت به جلو
کنترل ۲: یک کانال 0، 2.5 و 5 ولت آنالوگ برای حرکت به عقب، حالت توقف و حرکت به جلو و کانال دوم برای کنترل فرمان
کنترل ۳: مد RC کنترل شده بوسیله سیستم کنترل رادیویی استاندارد، ارتباط مستقیم با گیرنده RC (پالس ۱ تا ۲ میلی ثانیه با حالت توقف در 1.5 میلیثانیه)
کنترل ۴: مد RC کنترل شده بوسیله سیستم کنترل رادیویی استاندارد، کانال اول سرعت و کانال دوم فرمان را کنترل میکند.
کنترل ۵: استاندارد I2C، افزایش تا ۸ ماژول بر روی باس با دو روش عملکرد کنترل مستقیم موتورها و یا قابلیت ارسال دستور سرعت و جهت

کنترل شونده به وسیله رابط I2C یا سریال
دو روش عملکرد: کنترل مستقل و مستقیم موتورها یا قابلیت ارسال فرمان سرعت و جهت
ولتاژ: ۱۲ ولت، ولتاژ ۵ ولت برای مدار کنترل بورد توسط یک رگولاتور داخلی تأمین میگردد و ۳۰۰ میلیآمپر اضافی برای مدارهای دیگر قابل استفاده است.
جریان: تا 2.8 آمپر برای هر موتور
نوع encoder: قابلیت اتصال به انکودر با خروجی چهارتایی، در صورت اتصال به EMG30 هر دور به ۳۶۰ قسمت تقسیم میشود.
ابعاد: ۷۱ × ۶۰ میلی متر

کنترل شونده به وسیله رابط سریال با سرعت 9600 یا 38400
دو روش عملکرد: کنترل مستقل و مستقیم موتورها یا قابلیت ارسال فرمان سرعت و جهت
ولتاژ تغذیه: 24 ولت (هم برای موتور و هم مدار کنترل)
جریان: تا 5 آمپر برای هر موتور
نوع encoder: قابلیت اتصال به انکودر با خروجی چهارتایی، در صورت اتصال به EMG49 هر دور به ۵۸۸ قسمت تقسیم میشود.
ابعاد: ۱۰۹ × ۶۶ میلی متر
دارای حفاظت برای ولتاژ پایینتر یا ولتاژ بالاتر از حد مجاز و همچنین حفاظت در مقابل اتصال کوتاه موتور


تعداد خروجی سروموتور: تا ۸۴ کانال
تعداد خروجی دیجیتال: تا ۸۴ کانال
تعداد ورودی دیجیتال: تا ۸۴ کانال
تعداد ورودی آنالوگ: تا ۳۶ کانال با رزولوشن ۱۰ بیت
سرعت refresh فرمان سروموتور: ۲۰ میلی ثانیه تحت هر شرایطی
کنترل موقعیت: قابل برنامه ریزی مستقیم بر حسب میکرو ثانیه
کنترل سرعت: قابل تعریف از سرعت ماکزیمم تا ۲۰ ثانیه برای چرخش کامل
تغذیه سروموتور: ترمینالهای مجزا برای ولتاژ دلخواه در ۸ گروه سروموتور
تغذیه قسمت لاجیک: مستقیماً از پورت USB
واسط کنترل: پورت USB

Wheel125 یک چرخ با قطر ۱۲۵ میلی متر و پهنای ۲۸ میلی متر میباشد که آن را میتوان به موتور EMG49 یا هر موتور با شفت ۸ میلیمتر متصل نمود.

EMG49BR یک پایه محکم آلومینیومی برای موتور EMG49 میباشد.
