ROBOBUILDER
PishRobot is distributor of ROBOBUILDER products in Iran


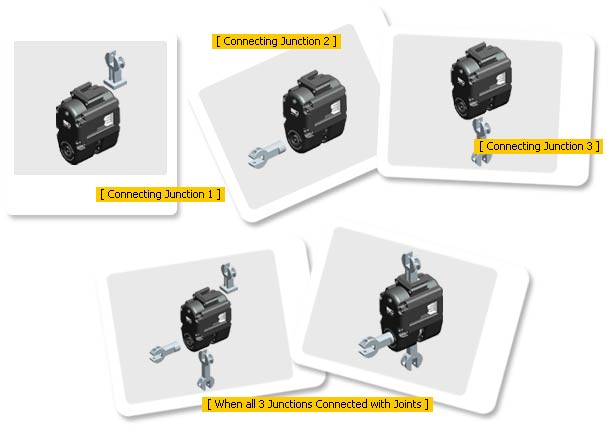
ROBOBUILDER’s wCk module developed and adopted the quick & simple joint-insert robot assembly method (patent registered) for the 1st time in the world. It modeled the articulated joint structure of human body so that wCK modules are connected simply by plugging in a joint part of various shapes. Additionally with 3 different connecting junction points available, a wCK module provides flexibility for building creative mechanical structure of a wide range of robotic applications. Taking advantage of this technology a standard robot with 16 degree of freedom can be assembled within an hour. This means robot developers can reduce enormous amount of cost and time in designing robot platform and focus more on academic research, key application technology, intelligence programming.
ROBOBUILDER Kits
RoboBuilder is a new robotic DIY kit designed for robotizen’s value of Education and Entertainment.
Any user with age 14 and up can enjoy designing and building robots simply by plugging and screwing block-type robotic actuator modules.
Various robotic platforms are designable with user’s creative ideas and skills.
Download fancy robotic motion files form Internet and play HUNO, DINO, DOGY the Standard Platforms.
Features:
01. Attractive Design
- High tech Robot with Attractive Design
- Customize unique Robot with optional accessories.
02. Creative Building- Create Various Robots enabled by Block-type Robotic Module
- Create Robot Designing realized by Joint Insert Building Scheme
03.Educational Kit
- Educational DIY Kit for Robotic Technology Training
- Training of Precise PID Motion Control
04. Quick & Simple Joint-Assembly
- Internationally Patented Joint Insert Building Structure
- Building completed within 1 hour
05. Robot File Sharing
- Share Robotic Files on Internet
- File Sharing realized by Precise Motion Control Technology
06. Entertaining Pal
- Various Games Supported by Quick & Splendid Robotic Motions
- Catalyst for Robotic Culture & Community
7.Competitive Price
- Most Price Competitive Robotic DIY Kit in the World
- Maximum Value for global Robotizes at Lowest Cost
01. Attractive Design
- High tech Robot with Attractive Design
- Customize unique Robot with optional accessories.
02. Creative Building- Create Various Robots enabled by Block-type Robotic Module
- Create Robot Designing realized by Joint Insert Building Scheme
03.Educational Kit
- Educational DIY Kit for Robotic Technology Training
- Training of Precise PID Motion Control
04. Quick & Simple Joint-Assembly
- Internationally Patented Joint Insert Building Structure
- Building completed within 1 hour
05. Robot File Sharing
- Share Robotic Files on Internet
- File Sharing realized by Precise Motion Control Technology
06. Entertaining Pal
- Various Games Supported by Quick & Splendid Robotic Motions
- Catalyst for Robotic Culture & Community
7.Competitive Price
- Most Price Competitive Robotic DIY Kit in the World
- Maximum Value for global Robotizes at Lowest Cost
Creator 5710K Parts:
- 1 system of RBC Intelligent Control System
- 16 blocks of wCK Smart Actuator Module
- 11 pcs of Body Part (7types)
- 39 pcs of joint Parts (12types)
- 20 pcs of wCK Module Cable
- 1 set of PC cable RS-232
- 1 set of Power Supply
- 1 set of Remote Controller
- 1 set of Blot & Nut
- 1 Book of User Guide Book
- 1 disk of Software CD

Kit Models
| Model | Color | DOF | Sound Sensor | Distance Sensor | Voice | Communication |
| RBK-5710K | Black | 16 | Y | N | N | IR Remote Control, Expandable for Bluetooth |
| RBK-5720T-S02 | Transparent | 16 | Y | Y | Y | IR Remote Control, Expandable for Bluetooth |
| RBK-5710K-E02 | Black | 8 | Y | Y | N | IR Remote Control, Expandable for Bluetooth |
| RBK-5730K | Black | 20 | Y | Y | Y | IR Remote Control, Bluetooth |
Accessories
wCK Series
- Communication Multi drop Full Duplex UART serial communication
- Baud Rate 4,800bps ~ 921,600bps(8 levels)
- Extension Max 254 modules per channel (ID 0~253)
- Operating Voltage 6VDC ~ 10VDC (7.4VDC~8.4VDC recommended)
- Speed Max No Load Speed 0.15 sec/60° (wCK-1108 under recommended voltage)
- Stall Torque Max 13kg·cm (wCK-1413 under recommended voltage)
- Max Power 1.1W (wCK-1108, 1111), 1.4W (wCK-1413)
- Gear Ratio 1/173 (wCK-1108), 1/241 (wCK-1111, 1413)
- Control Mode Position Control, Speed Control, Torque Control
- Control Angle 0~254 (Standard Resolution), 0~1,022 (High Resolution)
- Operating Angle 0°~269° (Standard Resolution), 0°~333° (High Resolution)
- Resolution 8 bit/1.055° (Standard Resolution), 10 bit/0.325° (High Resolution)
- Error Range ±0.8° (Standard Resolution)
- Speed Level 30 levels(Position Control Mode), 16 levels (Wheel Mode)
- Case Material Engineering Plastic
- Gear Material POM (wCK-1108), POM + Metal (wCK-1111,1413)
- Size 51.6 mm x 27.1 mm x 36.4 mm
- Weight 45g (wCK-1108), 49g (wCK-1111,1413)
wCK1108K
Color: Black
Color: Black

Control signal: Serial Data Packets
Max Torque: 8kg-cm
Max Speed: 0.15s/60°
Input: 1 analog (0~5V)
Outputs: 2 Digital (TTL)
LED: YES
wCK1108T
Color: Transparent
Color: Transparent

Control signal: Serial Data Packets
Max Torque: 8kg-cm
Max Speed: 0.15s/60°
Input: 1 analog (0~5V)
Outputs: 2 Digital (TTL)
LED: NO
wCK1111K
Color: Black
Color: Black
Control signal: Serial Data Packets
Max Torque: 11kg-cm
Max Speed: 0.21s/60°
Input: 1 analog (0~5V)
Outputs: 2 Digital (TTL)
LED: YES
wCK1111T
Color: Transparent
Color: Transparent
Control signal: Serial Data Packets
Max Torque: 11kg-cm
Max Speed: 0.21s/60°
Input: 1 analog (0~5V)
Outputs: 2 Digital (TTL)
LED: NO
RBX-ACL3A01
Triaxial Acceleration Sensor Module
Triaxial Acceleration Sensor Module

This 3 Axial Acceleration Sensor Module has an I2C interface and could be installed on RBC-08128 controllers to measure the acceleration of robot in 3 dimensions.